New kinematic notation and automatic generation of symbolic dynamics equations for space robots
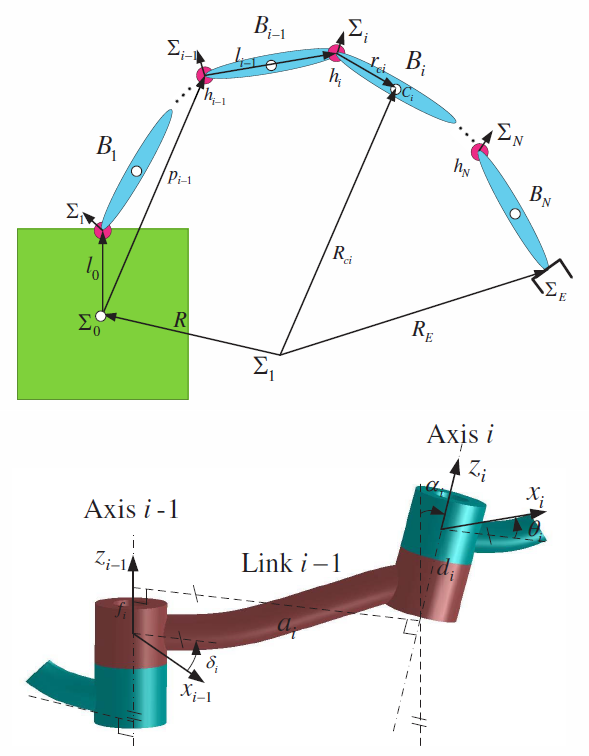
To verify and evaluate the performance of a space robot controller, kinematics and dynamics of the system have to be formed beforehand for computer simulation. The work is devoted to develop a new kinematic notation for space robots and to come up with an open source of Matlab subroutines for the propose of obtaining the proper dynamics equations of space robots in symbolic forms automatically. For the new kinematic notation, we will present the general form and two special cases. It is then demonstrated through an example the advantages such as flexible assignment of frames on space robots, being able to describe multi-DOF joint and achieve a consistent description for multi-arm space robots. For the second part, we adopt the Lagrangian Formulation for forming the procedures to automatically generate the dynamics equations of space robots in symbolic forms. An example is then provided to demonstrate the effectiveness of closed-loop simulation adopting the obtained symbolic equations.
For more information about the algorithm and features, please check the following references.
References
- Hui Zhang, Yingmin Jia, Junping Du, Jun Zhang, “New kinematic notation and automatic generation of symbolic dynamics equations for space robots,” Control Conference (CCC), 2014 33rd Chinese, pp.8341, 8346, 28-30 (2014).
